
Boogie Board Rover
I’m continually experimenting with autonomy for small vessels using ArduPilot and other open-source platforms. I’m particularly interested in mission planning and remote operation over long-range connections.
To that end, I wanted to build a simple marine rover as a testbed for autonomy projects. My core requirements were: - A stable platform with sufficient flotation to support later, undefined payloads - Minimal moving parts and points of failure in drivetrain - Good vessel dynamics: Zero turning radius, ability to achieve planing speed - Relatively inexpensive (<$500)
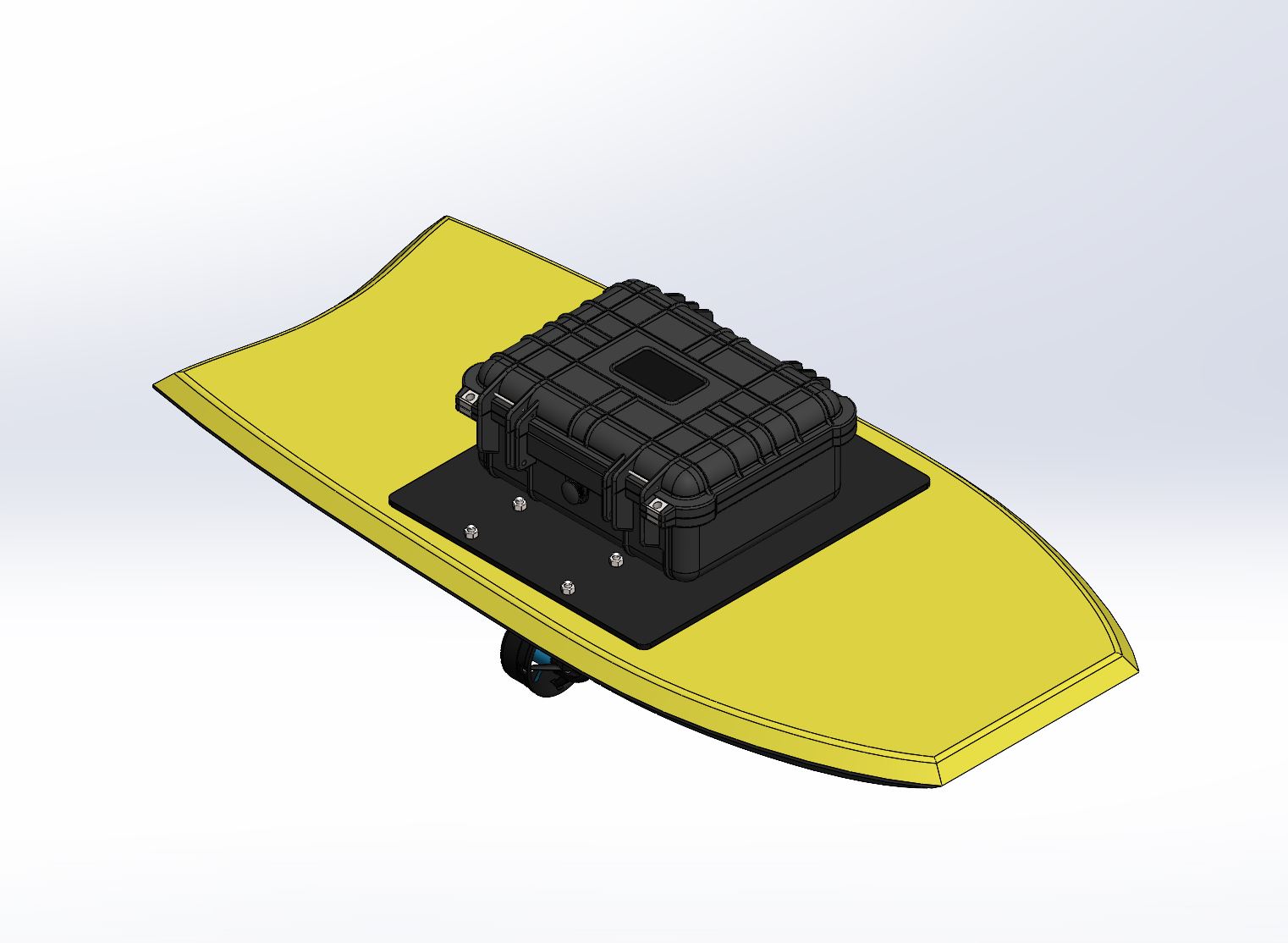
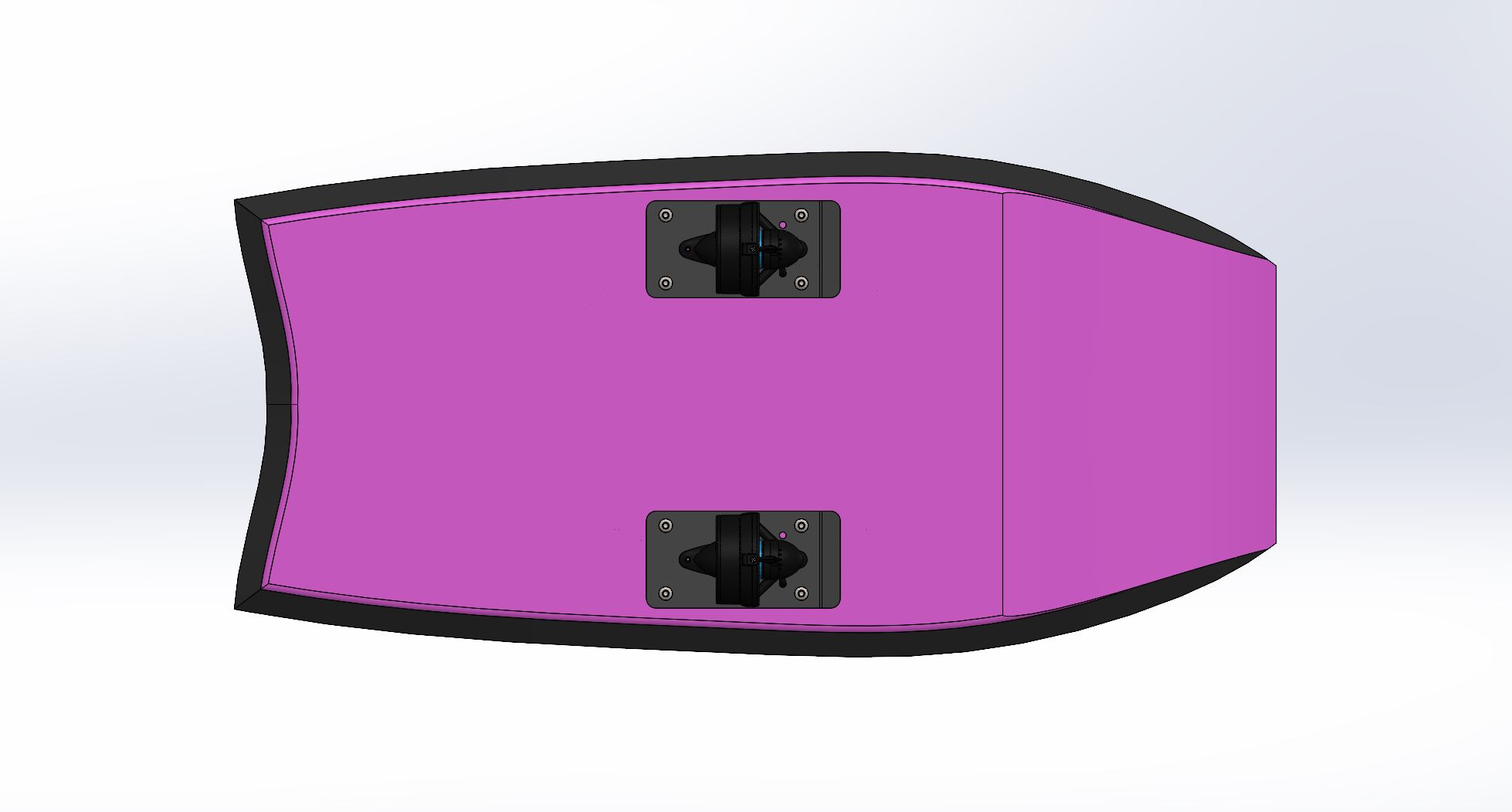
Based on these requirements, I designed and built a rover based on a boogie board hull and two marine thrusters for differential steering control. I used two Blue Robotics T200 thrusters mounted on HDPE sheets. The electronics are contained in a waterproof enclosure with ample room for future expansions.
To verify the design and facilitate later projects based on the platform, I built a complete CAD assembly of the hull and subsystems.

The “Boogie Board Rover” will be a capable platform for future projects. Stay tuned!